
| Home | S-100 Boards | History | New Boards | Software | Boards For Sale |
| Forum | Other Web Sites | News | Index |
Morrow S-100 Boards
24K RAM
64K RAM
Disk Jockey FDC
Multi I/O
SuperRAM
SwitchBoard
Z80 Board
Hard Disk Controller
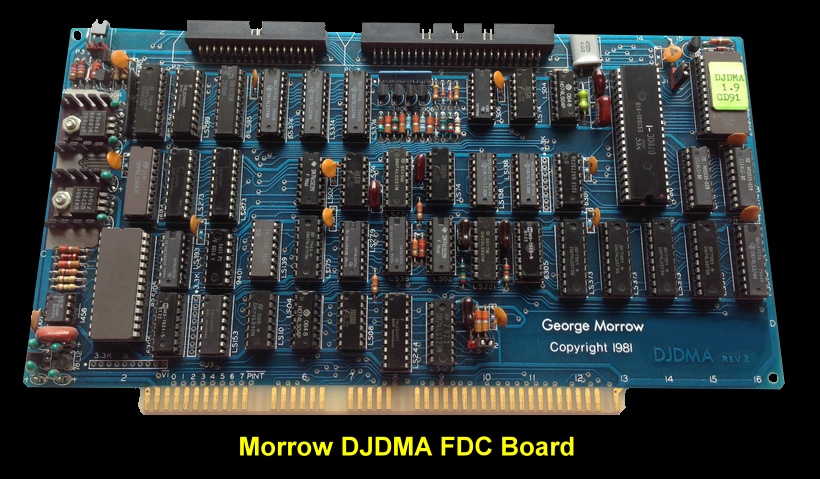
DJ-DMA FDC
8K DRAM
HDC-DMA Controller
This page was last modified on 05/04/2016