| |
I2C can be multi-master and multi-slave, which means there
can be more than one master and slave attached to the I2C bus |
|
SPI can be multi-save but not a multi-master. That means
there can be only one master attached to the SPI bus. |
| |
I2C is a half-duplex communication protocol |
|
SPI is a full duplex commination protocol. |
| |
I2C has the feature of clock stretching, that means if the
slave cannot able to send fast data as fast enough then it suppresses
the clock to stop the communication. |
|
Clock stretching is not possible with SPI. |
| |
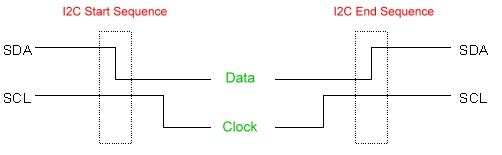
I2C uses only two wires for the communication, one wire
is used for the data and the second wire is used for the clock. |
|
SPI needs three or four wire for communication (depends
on requirement), MOSI, MISO, SCL and Chip-select. |
| |
I2C lines require pull-up resistors. |
|
There is no requirement of
a pull-up resistor in case of the SPI. |
| |
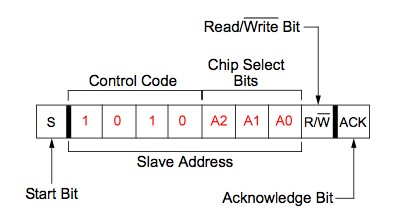
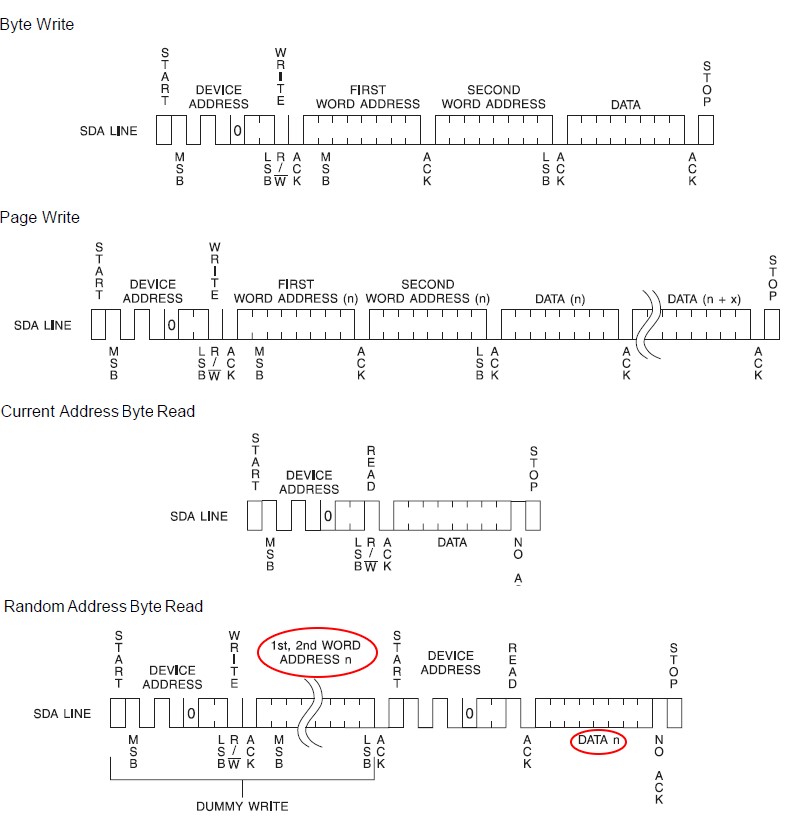
In I2C communication we get an acknowledgment bit after
each byte. |
|
Acknowledgment bits are not supported by the SPI
communication protocol. |